
14 Cursos
INGENIERIA ASISTIDA POR COMPUTADORA (CAE)
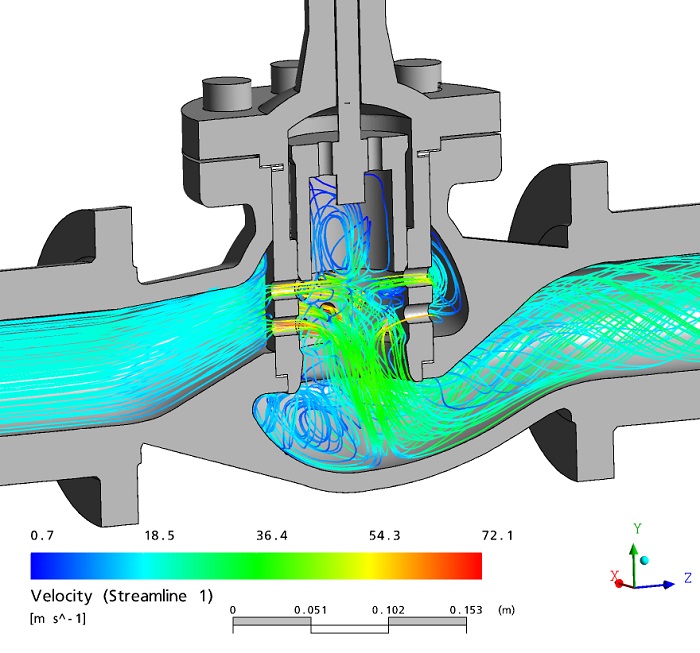
Con el curso de Ingeniería Asistida por Computadora, Computer Aided Engineering (CAE), el alumno tendrá una herramienta que le ayudara en el desarrollo y perfeccionamiento de productos. Con ayuda de una computadora, podrá realizar diferentes análisis como: análisis estáticos, dinámicos, de fluidos, térmicos, electromagnéticos y acústicos entre otros, que proporcionan beneficios como la reducción del tiempo en la elaboración de proyectos, aumento de la productividad, facilidad en la detección de fallas y ayuda en la identificación de soluciones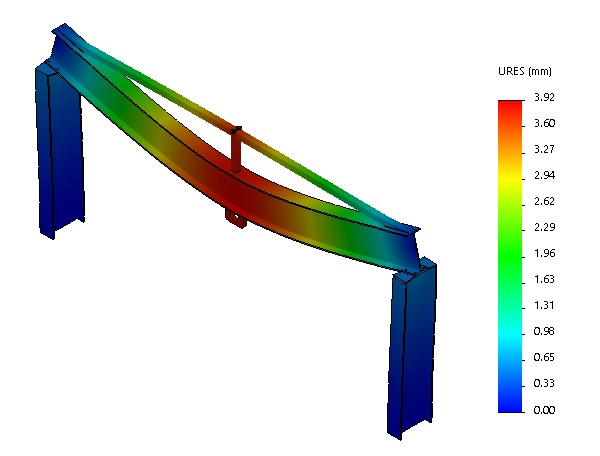
INGENIERÍA ASISTIDA POR COMPUTADORA 8A 8B M-A 2021
El curso INGENIERÍA ASISTIDA POR COMPUTADORA está diseñado para que el alumno aprenda a evaluar el diseño de componentes mecánicos, a través del método de elemento finito (MEF) y software de ingeniería asistida por computadora (CAE) para cumplir con las especificaciones estructurales de los sistemas mecatrónicos y robóticos.

Adquisición y procesamiento digital de señales (Ene2024)
El alumno programará filtros digitales mediante las técnicas de muestreo y conversión de señales, análisis frecuencial procedimientos de diseño y programación de filtros para el mejoramiento de señales producidas por sensores en procesos de control.
Ingeniería Asistida por Computadora (8E, 8F, 8G)
El alumno simulará sistemas mecánicos sometidos a cargas estáticas para determinar el comportamiento de
parámetros estructurales, modos de vibración.
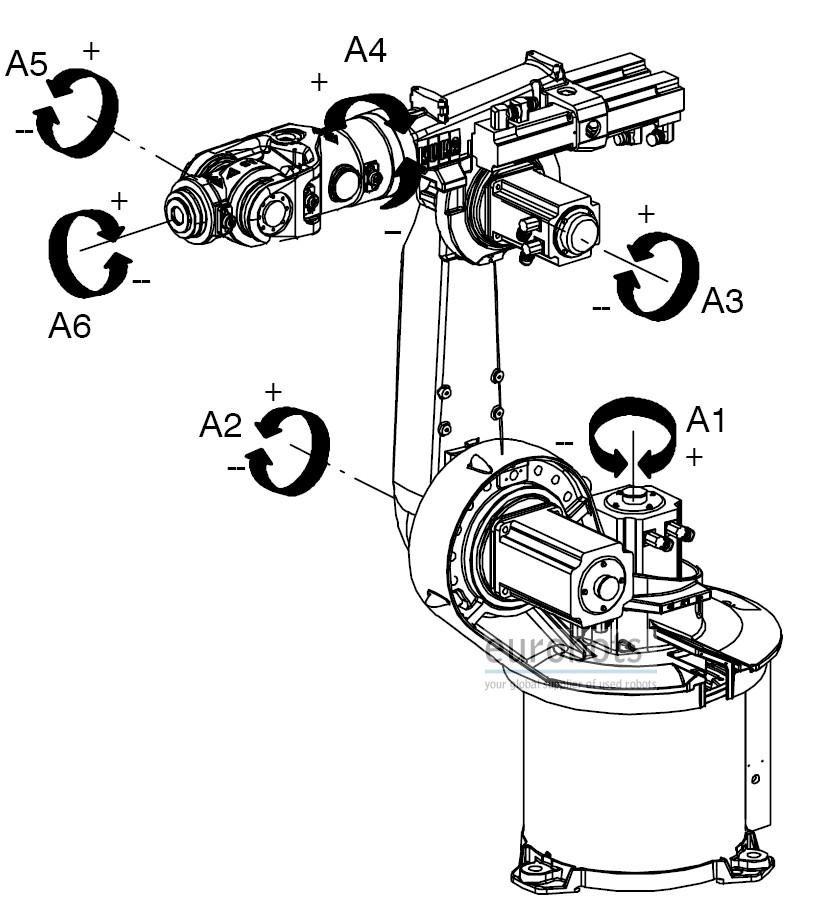
DINÁMICA DE ROBOTS
El alumno determinará el modelo dinámico de manipuladores de n grados de libertad a través de metodologías
matemáticas y de simulación para describir la relación entre el movimiento y las fuerzas implicadas en el
sistema robótico.
SISTEMAS DE VISIÓN ARTIFICIAL
El alumno implementará sistemas de visión artificial mediante hardware especializado, algoritmos de Procesamiento digital de imágenes (PDI) y metrología óptica, para verificar piezas y ensambles en la etapa de control de calidad de procesos de manufactura.
Ingeniería de Control INC-FT
El presente curso esta enfocado a alumnos de 8o cuatrimestre de Ingeniería Mecatrónica, en este encontrarán los temas relacionados con la asignatua de Ingeniería de control, en la que los alumnos diseñarán sistemas de control a partir del cálculo de la respuesta de sistemas dinámicos para compensar las condiciones de desempeño establecidas en los sistemas mecatrónicos y robóticos.
Dinámica de Robots curso especial
https://campusvirtual.uptlax.edu.mx/pluginfile.php/96252/course/summary/Din%C3%A1mica%20de%20robots%202.docxLa dinámica del robot relaciona el movimiento del robot y las fuerzas implicadas en el mismo. El modelo dinámico establece relaciones matemáticas entre las coordenadas articulares (o las coordenadas del extremo del robot), sus derivadas (velocidad y aceleración), las fuerzas y pares aplicados en las articulaciones (o en el extremo) y los parámetros del robot (masas de los eslabones, inercias, etc).
INGENIERIA DE CONTROL 8A
Wikipedia
Control significa una acción específica para alcanzar el comportamiento deseado de un sistema. En el control de los procesos industriales, generalmente se consideran procesos tecnológicos, pero es muy necesario el control para mantener cualquier proceso físico, químico, biológico, de comunicación, económico o social funcionando de la manera deseada.
(Michael J. Grimble, Glasgow, UK)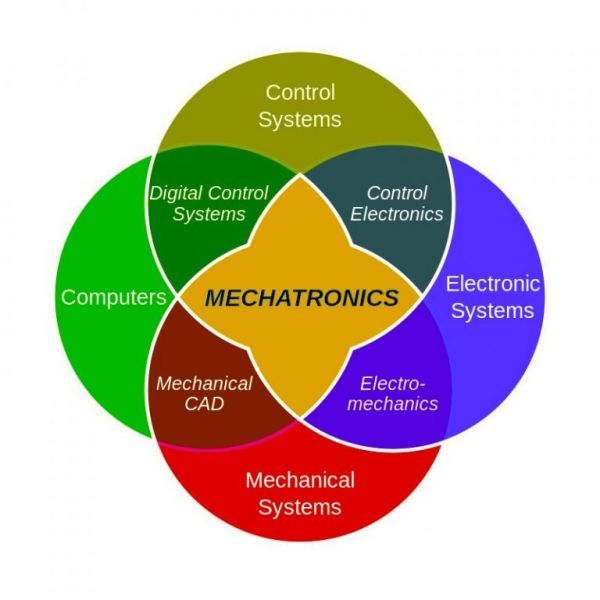
DISEÑO DE SISTEMAS MECATRÓNICOS ENERO - ABRIL 2025
El alumno diseñará sistemas mecatrónicos a través de las especificaciones de requerimientos, cálculos matemáticos y simulación de las etapas mecánica, electrónica y de control para proponer soluciones a problemáticas de procesos industriales y de servicios.
INGLÉS VIII GRUPOS A,B
En este curso se busca desarrollar sus habilidades lingüísticas en la lengua meta mediante el uso de diferentes herramientas que proporciona la plataforma de Moodle. Para lo cual se les solicita tiempo, paciencia y mucha dedicación.
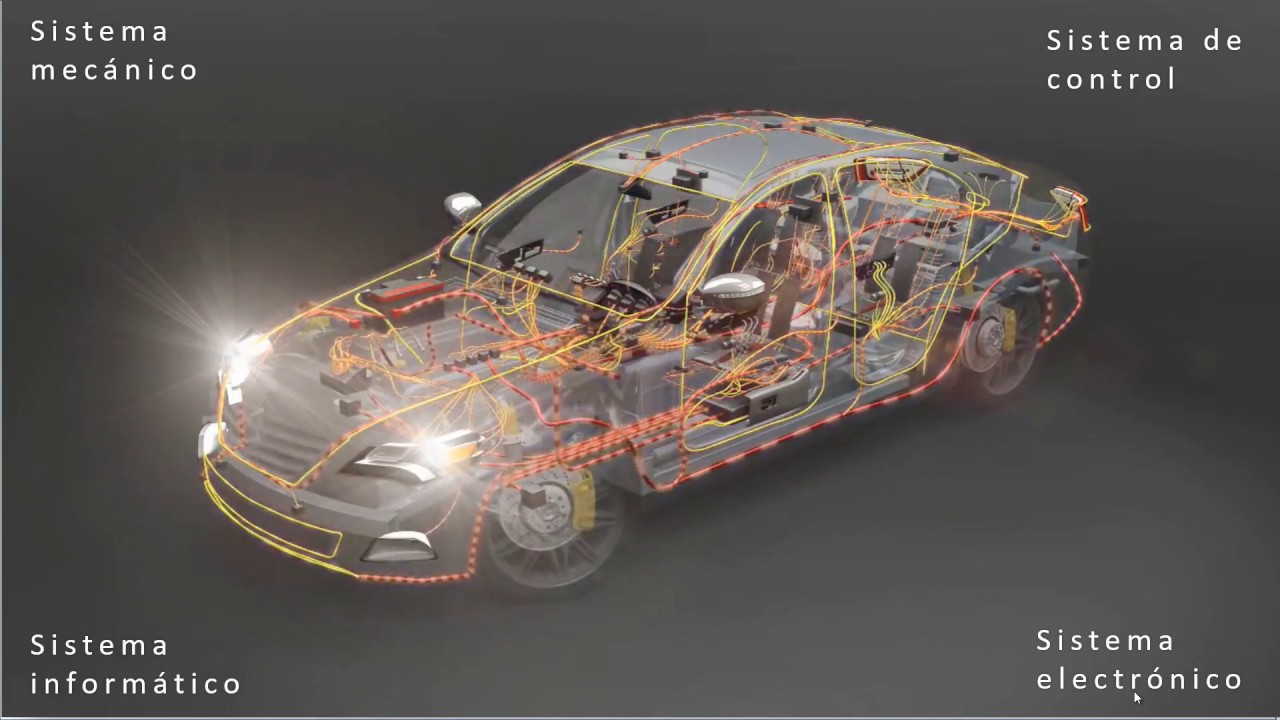
Diseño de Sistemas Mecatrónicos 2022
Les doy la más cordial bienvenida a este nuevo cuatrimestre y al curso de Diseño de Sistemas Mecatrónicos.
El alumno diseñará sistemas mecatrónicos a través de las especificaciones de requerimientos, cálculos
matemáticos y simulación de las etapas mecánica, electrónica y de control para proponer soluciones a
problemáticas de procesos industriales y de servicios.
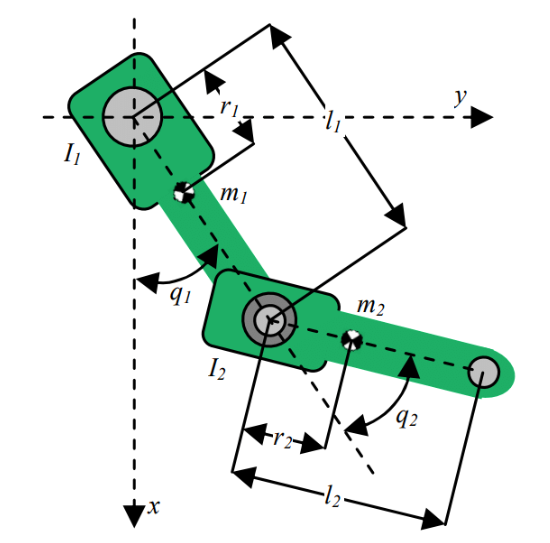
Dinámica de Robots
La dinámica del robot relaciona el movimiento del robot y las fuerzas implicadas
en el mismo. El modelo dinámico establece relaciones matemáticas entre las
coordenadas articulares (o las coordenadas del extremo del robot), sus derivadas
(velocidad y aceleración), las fuerzas y pares aplicados en las articulaciones (o en el
extremo) y los parámetros del robot (masas de los eslabones, inercias, etc).
en este curso:
El alumno determinará el modelo dinámico de manipuladores de n grados de libertad a través de
metodologías matemáticas y de simulación para describir la relación entre el movimiento y las fuerzas
implicadas en el sistema robótico.

SISTEMAS DE VISIÓN ARTIFICIAL
El alumno implementará sistemas de visión artificial mediante hardware especializado, algoritmos de Procesamiento digital de imágenes (PDI) y metrología óptica, para verificar piezas y ensambles en la etapa de control de calidad de procesos de manufactura.
