
11 Cursos
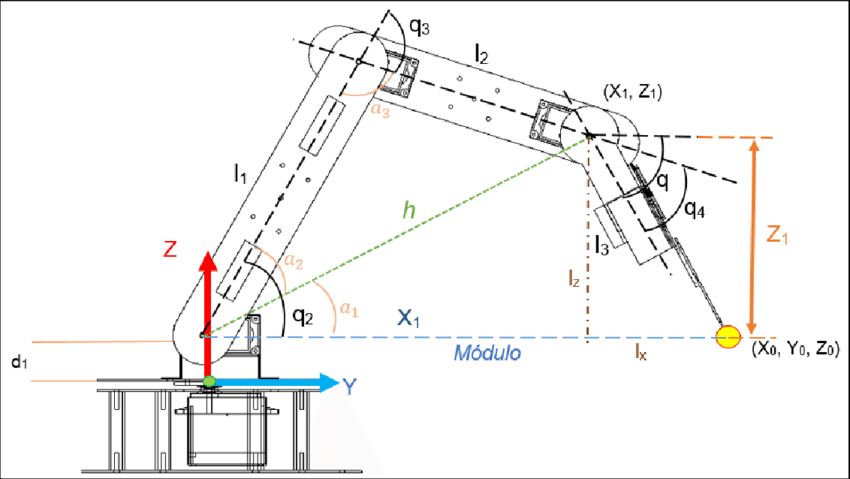
CINEMÁTICA DE ROBOTS
El alumno obtendrá el modelo cinemático de manipuladores, a través de métodos geométricos, analíticos y
de simulación para determinar la posición, orientación y velocidad del efector final y plataforma móvil de
robots industriales.
PROGRAMACIÓN DE SISTEMAS EMBEBIDOS (Sep2023)
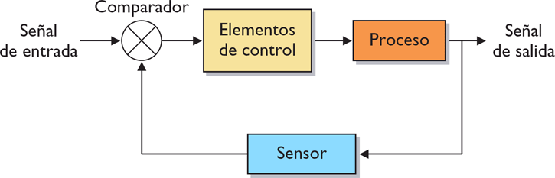
En esta asignatura se describirán las partes de un sistema de control integrado, tanto de Hardware como de Software capaz de ofrecer una solución a un problema especifico en base a los requerimientos específicos de una aplicación.
Cinemática de Robots
El alumno obtendrá el modelo cinemático de manipuladores, a través de métodos geométricos, analíticos y de simulación para determinar la posición, orientación y velocidad del efector final y plataforma móvil de robots industriales.
Cinemática de robots 7 E,F,G. Sep-Dic 2020
En este curso el alumno obtendrá el modelo cinemático de manipuladores, a través de métodos geométricos, analíticos y de simulación para determinar la posición, orientación y velocidad del efector final y plataforma móvil de robots industriales.

Programación de Robots Industriales 2023
La asignatura PROGRAMACIÓN DE ROBOTS INDUSTRIALES está diseñada para que el alumno aprenda a programar robots industriales mediante lenguajes, entornos de programación y procesos de configuración, para su integración en procesos industriales.
DISEÑO Y SELECCIÓN DE ELEMENTOS MECÁNICOS E-A 2026
El objetivo de la asignatura es que el alumno adquiera las competencias para diseñar sistemas mecatrónicos y robóticos con base
en los requerimientos del proceso y la detección de áreas de oportunidad
mediante metodologías, herramientas de diseño, simulación y manufactura para
brindar soluciones tecnológicas innovadoras a las necesidades de los procesos
productivos y servicios.

PROCEDIMIENTO : ' E s t a n c i a ' I/ II. Septiembre- Diciembre 2021 ASESOR : M en C María del Rayo Zempoalteca Ramírez
El procedimiento de estancias I/II te ayuda a entablar una interrelación con la empresa, con el fin de conocer las áreas y oportunidades dentro de la dinámica de sus procesos que te ofrecen
Al ingresar en una empresa a hacer tus proceso de Estancia I/II te darás cuenta de las habilidades que debes enfatizar en desarrollar si quieres impactar en ese sector o en un sector distinto.
Además te provee de experiencia en sitio, trabajo de campo y te ayuda a desenvolverte y ver las áreas de oportunidad que debes reforzar de acuerdo al plan de vida que tengas pensado o que empieces a vislumbrar.
También te da la oportunidad de comenzar a desarrollar tu portafolio de proyectos y/o tu curriculum vitae. elementos imprescindibles al momento de postularse para un trabajo.
Cinematica de Robots
El alumno obtendrá el modelo cinemático de manipuladores, a través de métodos geométricos, analíticos y de simulación para determinar la posición, orientación y velocidad del efector final y plataforma móvil de robots industriales.
PROGRAMACIÓN DE SISTEMAS EMBEBIDOS
El curso de Programación de Sistemas Embebidos ha sido diseñado para
brindar al estudiante los conocimientos necesarios sobre la arquitectura
general, características técnicas, entornos y lenguajes de programación
de sistemas embebidos. De la misma manera, se busca que el alumno pueda
afianzar dichos conocimientos para tener las competencias necesarias
que le permitan seleccionar un sistema embebido en específico, en
función de las características particulares del proceso donde se
requiera su implantación y así mismo pueda programar dicho sistema de
forma eficaz.
Esperamos que este curso cumpla con las expectativas de cada estudiante y les deseamos éxito.
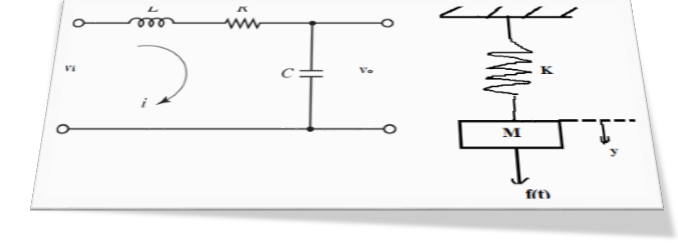
MODELADO Y SIMULACIÓN DE SISTEMAS
En este curso el alumno obtendrá los conocimientos necesarios para obtener modelos matemáticos de sistemas dinámicos, mediante funciones
de transferencia
y
espacio de estados para simular su respuesta y proponer controladores.
